spline_filter#
- scipy.ndimage.spline_filter(input, order=3, output=<class 'numpy.float64'>, mode='mirror')[Quelle]#
Mehrdimensionaler Spline-Filter.
- Parameter:
- inputarray_like
Das Eingabearray.
- orderint, optional
Die Ordnung des Splines, Standard ist 3.
- outputndarray oder dtype, optional
Das Array, in dem die Ausgabe platziert werden soll, oder der dtype des zurückgegebenen Arrays. Standard ist
numpy.float64.- mode{‘reflect’, ‘grid-mirror’, ‘constant’, ‘grid-constant’, ‘nearest’, ‘mirror’, ‘grid-wrap’, ‘wrap’}, optional
Der Parameter mode bestimmt, wie das Eingabearray über seine Grenzen hinaus erweitert wird. Standard ist ‘mirror’. Das Verhalten für jeden gültigen Wert ist wie folgt (siehe zusätzliche Plots und Details unter Randmodi)
- ‘reflect’ (d c b a | a b c d | d c b a)
Die Eingabe wird erweitert, indem über den Rand des letzten Pixels gespiegelt wird. Dieser Modus wird auch manchmal als halb-Sample-symmetrisch bezeichnet.
- ‘grid-mirror’
Dies ist ein Synonym für ‘reflect’.
- ‘constant’ (k k k k | a b c d | k k k k)
Die Eingabe wird erweitert, indem alle Werte außerhalb des Rands mit demselben konstanten Wert gefüllt werden, der durch den Parameter cval definiert ist. Außerhalb der Grenzen der Eingabe wird keine Interpolation durchgeführt.
- ‘grid-constant’ (k k k k | a b c d | k k k k)
Die Eingabe wird erweitert, indem alle Werte außerhalb des Rands mit demselben konstanten Wert gefüllt werden, der durch den Parameter cval definiert ist. Die Interpolation erfolgt auch für Abtastpunkte außerhalb des Umfangs der Eingabe.
- ‘nearest’ (a a a a | a b c d | d d d d)
Die Eingabe wird erweitert, indem das letzte Pixel wiederholt wird.
- ‘mirror’ (d c b | a b c d | c b a)
Die Eingabe wird erweitert, indem über die Mitte des letzten Pixels gespiegelt wird. Dieser Modus wird auch manchmal als ganz-Sample-symmetrisch bezeichnet.
- ‘grid-wrap’ (a b c d | a b c d | a b c d)
Die Eingabe wird erweitert, indem zum gegenüberliegenden Rand umgebrochen wird.
- ‘wrap’ (d b c d | a b c d | b c a b)
Die Eingabe wird durch Umwickeln zum gegenüberliegenden Rand erweitert, jedoch so, dass der letzte und der erste Punkt genau übereinanderliegen. In diesem Fall ist nicht eindeutig definiert, welcher Abtastpunkt am Überlappungspunkt gewählt wird.
- Rückgabe:
- spline_filterndarray
Gefiltertes Array. Hat die gleiche Form wie input.
Siehe auch
spline_filter1dBerechnet einen 1-D-Spline-Filter entlang der gegebenen Achse.
Hinweise
Der mehrdimensionale Filter wird als eine Folge von 1-D-Spline-Filtern implementiert. Die Zwischenarrays werden im selben Datentyp wie die Ausgabe gespeichert. Daher können die Ergebnisse für Ausgabetypen mit begrenzter Genauigkeit ungenau sein, da Zwischenergebnisse mit unzureichender Genauigkeit gespeichert werden können.
Für komplexwertige input verarbeitet diese Funktion die reellen und imaginären Komponenten unabhängig voneinander.
Hinzugefügt in Version 1.6.0: Unterstützung für komplexe Werte hinzugefügt.
Beispiele
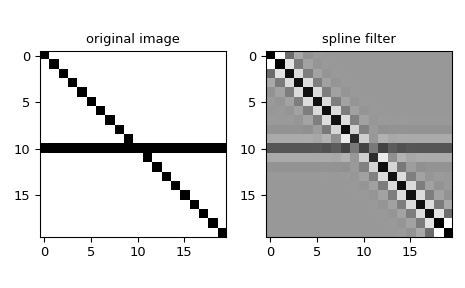
Wir können ein Bild mit mehrdimensionalen Splines filtern
>>> from scipy.ndimage import spline_filter >>> import numpy as np >>> import matplotlib.pyplot as plt >>> orig_img = np.eye(20) # create an image >>> orig_img[10, :] = 1.0 >>> sp_filter = spline_filter(orig_img, order=3) >>> f, ax = plt.subplots(1, 2, sharex=True) >>> for ind, data in enumerate([[orig_img, "original image"], ... [sp_filter, "spline filter"]]): ... ax[ind].imshow(data[0], cmap='gray_r') ... ax[ind].set_title(data[1]) >>> plt.tight_layout() >>> plt.show()