bessel#
- scipy.signal.bessel(N, Wn, btype='low', analog=False, output='ba', norm='phase', fs=None)[Quelle]#
Bessel/Thomson digital- und Analogfilter-Design.
Entwerfen Sie einen Bessel-Filter der Ordnung N, digital oder analog, und geben Sie die Filterkoeffizienten zurück.
- Parameter:
- Nint
Die Ordnung des Filters.
- Wnarray_like
Ein Skalar oder eine Sequenz der Länge 2, die die Grenzfrequenzen angibt (definiert durch den Parameter norm). Für analoge Filter ist Wn eine Winkelfrequenz (z.B. rad/s).
Für digitale Filter sind Wn in derselben Einheit wie fs angegeben. Standardmäßig ist fs 2 Halbzyklen/Sample, daher sind diese von 0 bis 1 normalisiert, wobei 1 die Nyquist-Frequenz ist. (Wn sind somit in Halbzyklen / Sample.)
- btype{‘lowpass’, ‘highpass’, ‘bandpass’, ‘bandstop’}, optional
Der Filtertyp. Standard ist ‘lowpass’.
- analogbool, optional
Wenn True, wird ein analoger Filter zurückgegeben, ansonsten ein digitaler Filter. (Siehe Hinweise.)
- output{‘ba’, ‘zpk’, ‘sos’}, optional
Typ der Ausgabe: Zähler/Nenner ('ba'), Pol-Nullstelle ('zpk') oder Sekundärabschnitte ('sos'). Standard ist 'ba'.
- norm{‘phase’, ‘delay’, ‘mag’}, optional
Normalisierung der Grenzfrequenz
phaseDer Filter wird so normalisiert, dass die Phasenantwort ihren Mittelpunkt bei der Winkelfrequenz (z.B. rad/s) Wn erreicht. Dies geschieht sowohl für Tiefpass- als auch für Hochpassfilter, daher ist dies der "phasenabgestimmte" Fall.
Die Asymptoten des Amplitudenverlaufs sind die gleichen wie bei einem Butterworth-Filter gleicher Ordnung mit einer Grenzfrequenz von Wn.
Dies ist die Standardeinstellung und entspricht der Implementierung von MATLAB.
delayDer Filter wird so normalisiert, dass die Gruppenlaufzeit im Durchlassbereich 1/Wn (z.B. Sekunden) beträgt. Dies ist der "natürliche" Typ, der durch Lösung der Bessel-Polynome erhalten wird.
magDer Filter wird so normalisiert, dass die Verstärkung bei der Winkelfrequenz Wn -3 dB beträgt.
Hinzugefügt in Version 0.18.0.
- fsfloat, optional
Die Abtastfrequenz des digitalen Systems.
Hinzugefügt in Version 1.2.0.
- Rückgabe:
- b, andarray, ndarray
Zähler- (b) und Nenner- (a) Polynome des IIR-Filters. Nur zurückgegeben, wenn
output='ba'.- z, p, kndarray, ndarray, float
Nullstellen, Pole und Systemverstärkung der Übertragungsfunktion des IIR-Filters. Nur zurückgegeben, wenn
output='zpk'.- sosndarray
Zweistufige Abschnittsdarstellung des IIR-Filters. Nur zurückgegeben, wenn
output='sos'.
Hinweise
Auch bekannt als Thomson-Filter, hat der analoge Bessel-Filter eine maximal flache Gruppenlaufzeit und eine maximal lineare Phasenantwort mit sehr wenig Ausreißern in der Sprungantwort. [1]
Der Bessel ist von Natur aus ein analoger Filter. Diese Funktion erzeugt digitale Bessel-Filter mit der Bilinear-Transformation, die die Phasenantwort des analogen Filters nicht beibehält. Daher ist sie nur für Frequenzen unterhalb von etwa fs/4 annähernd korrekt. Um eine maximal flache Gruppenlaufzeit bei höheren Frequenzen zu erzielen, muss der analoge Bessel-Filter mit Phasen-erhaltenden Techniken transformiert werden.
Siehe
besselapfür Implementierungsdetails und Referenzen.Der Parameter
output='sos'wurde in 0.16.0 hinzugefügt.Referenzen
[1]Thomson, W.E., „Delay Networks having Maximally Flat Frequency Characteristics“, Proceedings of the Institution of Electrical Engineers, Part III, November 1949, Vol. 96, No. 44, S. 487-490.
Beispiele
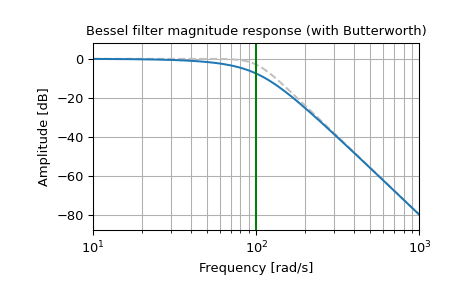
Stellen Sie die phasen-normalisierte Frequenzantwort dar, die den Zusammenhang mit der Grenzfrequenz des Butterworth-Filters (grün) zeigt
>>> from scipy import signal >>> import matplotlib.pyplot as plt >>> import numpy as np
>>> b, a = signal.butter(4, 100, 'low', analog=True) >>> w, h = signal.freqs(b, a) >>> plt.semilogx(w, 20 * np.log10(np.abs(h)), color='silver', ls='dashed') >>> b, a = signal.bessel(4, 100, 'low', analog=True, norm='phase') >>> w, h = signal.freqs(b, a) >>> plt.semilogx(w, 20 * np.log10(np.abs(h))) >>> plt.title('Bessel filter magnitude response (with Butterworth)') >>> plt.xlabel('Frequency [rad/s]') >>> plt.ylabel('Amplitude [dB]') >>> plt.margins(0, 0.1) >>> plt.grid(which='both', axis='both') >>> plt.axvline(100, color='green') # cutoff frequency >>> plt.show()
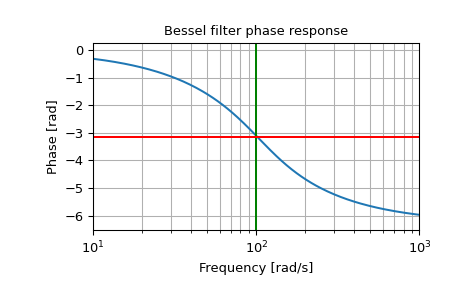
und den Phasenmittelpunkt
>>> plt.figure() >>> plt.semilogx(w, np.unwrap(np.angle(h))) >>> plt.axvline(100, color='green') # cutoff frequency >>> plt.axhline(-np.pi, color='red') # phase midpoint >>> plt.title('Bessel filter phase response') >>> plt.xlabel('Frequency [rad/s]') >>> plt.ylabel('Phase [rad]') >>> plt.margins(0, 0.1) >>> plt.grid(which='both', axis='both') >>> plt.show()
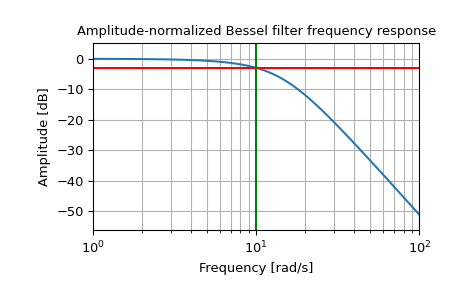
Stellen Sie die amplituden-normalisierte Frequenzantwort dar, die die -3 dB Grenzfrequenz zeigt
>>> b, a = signal.bessel(3, 10, 'low', analog=True, norm='mag') >>> w, h = signal.freqs(b, a) >>> plt.semilogx(w, 20 * np.log10(np.abs(h))) >>> plt.axhline(-3, color='red') # -3 dB magnitude >>> plt.axvline(10, color='green') # cutoff frequency >>> plt.title('Amplitude-normalized Bessel filter frequency response') >>> plt.xlabel('Frequency [rad/s]') >>> plt.ylabel('Amplitude [dB]') >>> plt.margins(0, 0.1) >>> plt.grid(which='both', axis='both') >>> plt.show()
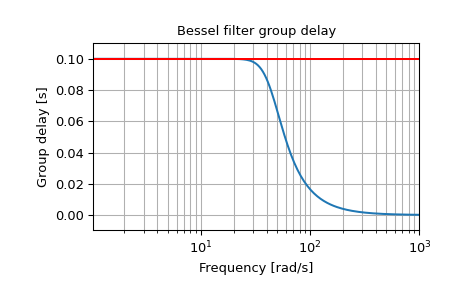
Stellen Sie den laufzeit-normalisierten Filter dar, der die maximal flache Gruppenlaufzeit von 0,1 Sekunden zeigt
>>> b, a = signal.bessel(5, 1/0.1, 'low', analog=True, norm='delay') >>> w, h = signal.freqs(b, a) >>> plt.figure() >>> plt.semilogx(w[1:], -np.diff(np.unwrap(np.angle(h)))/np.diff(w)) >>> plt.axhline(0.1, color='red') # 0.1 seconds group delay >>> plt.title('Bessel filter group delay') >>> plt.xlabel('Frequency [rad/s]') >>> plt.ylabel('Group delay [s]') >>> plt.margins(0, 0.1) >>> plt.grid(which='both', axis='both') >>> plt.show()