filtfilt#
- scipy.signal.filtfilt(b, a, x, axis=-1, padtype='odd', padlen=None, method='pad', irlen=None)[Quelle]#
Wendet einen digitalen Filter vorwärts und rückwärts auf ein Signal an.
Diese Funktion wendet einen linearen digitalen Filter zweimal an, einmal vorwärts und einmal rückwärts. Der kombinierte Filter hat Null-Phase und eine doppelte Filterordnung des Originals.
Die Funktion bietet Optionen für die Behandlung der Signalränder.
Die Funktion
sosfiltfilt(und Filterdesign mitoutput='sos') sollte für die meisten Filteraufgabenfiltfiltvorgezogen werden, da Zweistufenfilter weniger numerische Probleme aufweisen.- Parameter:
- b(N,) array_like
Der Zählerkoeffizientenvektor des Filters.
- a(N,) array_like
Der Nennerkoeffizientenvektor des Filters. Wenn
a[0]nicht 1 ist, werden sowohl a als auch b durcha[0]normalisiert.- xarray_like
Das Array der zu filternden Daten.
- axisint, optional
Die Achse von x, auf die der Filter angewendet wird. Standard ist -1.
- padtypestr oder None, optional
Muss ‘odd’, ‘even’, ‘constant’ oder None sein. Dies bestimmt die Art der Erweiterung, die für das aufgefüllte Signal verwendet wird, auf das der Filter angewendet wird. Wenn padtype None ist, wird keine Auffüllung verwendet. Standard ist ‘odd’.
- padlenint oder None, optional
Die Anzahl der Elemente, um die x an beiden Enden der Achse axis erweitert wird, bevor der Filter angewendet wird. Dieser Wert muss kleiner sein als
x.shape[axis] - 1.padlen=0bedeutet keine Auffüllung. Der Standardwert ist3 * max(len(a), len(b)).- methodstr, optional
Bestimmt die Methode zur Behandlung der Signalränder, entweder “pad” oder “gust”. Wenn method “pad” ist, wird das Signal aufgefüllt; die Art der Auffüllung wird durch padtype und padlen bestimmt, und irlen wird ignoriert. Wenn method “gust” ist, wird die Methode von Gustafsson verwendet und padtype und padlen werden ignoriert.
- irlenint oder None, optional
Wenn method “gust” ist, gibt irlen die Länge der Impulsantwort des Filters an. Wenn irlen None ist, wird kein Teil der Impulsantwort ignoriert. Für ein langes Signal kann die Angabe von irlen die Leistung des Filters erheblich verbessern.
- Rückgabe:
- yndarray
Der gefilterte Ausgang mit der gleichen Form wie x.
Siehe auch
Hinweise
Wenn method “pad” ist, füllt die Funktion die Daten entlang der angegebenen Achse auf drei Arten auf: ungerade, gerade oder konstant. Die ungeraden und geraden Erweiterungen haben die entsprechende Symmetrie zum Endpunkt der Daten. Die konstante Erweiterung erweitert die Daten mit den Werten an den Endpunkten. Sowohl im Vorwärts- als auch im Rückwärtsdurchlauf wird die Anfangsbedingung des Filters mithilfe von
lfilter_zigefunden und mit dem Endpunkt der erweiterten Daten skaliert.Wenn method “gust” ist, wird die Methode von Gustafsson [1] verwendet. Die Anfangsbedingungen für den Vorwärts- und Rückwärtsdurchlauf werden so gewählt, dass der Vorwärts-Rückwärts-Filter das gleiche Ergebnis wie der Rückwärts-Vorwärts-Filter liefert.
Die Option zur Verwendung der Gustaffson-Methode wurde in der SciPy-Version 0.16.0 hinzugefügt.
Referenzen
[1]F. Gustaffson, „Determining the initial states in forward-backward filtering“, Transactions on Signal Processing, Bd. 46, S. 988-992, 1996.
Beispiele
Die Beispiele verwenden mehrere Funktionen aus
scipy.signal.>>> import numpy as np >>> from scipy import signal >>> import matplotlib.pyplot as plt
Zuerst erstellen wir ein einsekündiges Signal, das die Summe zweier reiner Sinuswellen mit Frequenzen von 5 Hz und 250 Hz ist, abgetastet mit 2000 Hz.
>>> t = np.linspace(0, 1.0, 2001) >>> xlow = np.sin(2 * np.pi * 5 * t) >>> xhigh = np.sin(2 * np.pi * 250 * t) >>> x = xlow + xhigh
Erstellen Sie nun einen Tiefpass-Butterworth-Filter mit einer Grenzfrequenz von 0,125 mal der Nyquist-Frequenz oder 125 Hz, und wenden Sie ihn mit
filtfiltaufxan. Das Ergebnis sollte ungefährxlowentsprechen, ohne Phasenverschiebung.>>> b, a = signal.butter(8, 0.125) >>> y = signal.filtfilt(b, a, x, padlen=150) >>> np.abs(y - xlow).max() 9.1086182074789912e-06
Wir erhalten ein ziemlich sauberes Ergebnis für dieses künstliche Beispiel, da die ungerade Erweiterung exakt ist und die Transienten des Filters mit der moderat langen Auffüllung abklingen, bevor die eigentlichen Daten erreicht werden. Im Allgemeinen sind Transienteneffekte an den Rändern unvermeidlich.
Das folgende Beispiel demonstriert die Option
method="gust".Erstellen Sie zuerst einen Filter.
>>> b, a = signal.ellip(4, 0.01, 120, 0.125) # Filter to be applied.
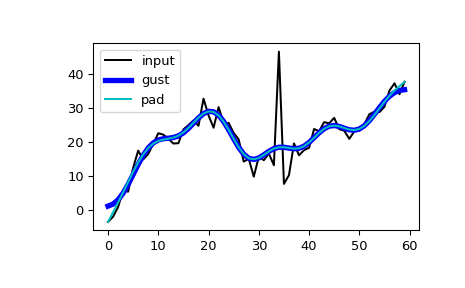
sig ist ein zufälliges Eingangssignal, das gefiltert werden soll.
>>> rng = np.random.default_rng() >>> n = 60 >>> sig = rng.standard_normal(n)**3 + 3*rng.standard_normal(n).cumsum()
Wenden Sie
filtfiltauf sig an, einmal mit der Gustafsson-Methode und einmal mit Auffüllung, und plotten Sie die Ergebnisse zum Vergleich.>>> fgust = signal.filtfilt(b, a, sig, method="gust") >>> fpad = signal.filtfilt(b, a, sig, padlen=50) >>> plt.plot(sig, 'k-', label='input') >>> plt.plot(fgust, 'b-', linewidth=4, label='gust') >>> plt.plot(fpad, 'c-', linewidth=1.5, label='pad') >>> plt.legend(loc='best') >>> plt.show()
Das Argument irlen kann verwendet werden, um die Leistung der Gustafsson-Methode zu verbessern.
Schätzen Sie die Länge der Impulsantwort des Filters ab.
>>> z, p, k = signal.tf2zpk(b, a) >>> eps = 1e-9 >>> r = np.max(np.abs(p)) >>> approx_impulse_len = int(np.ceil(np.log(eps) / np.log(r))) >>> approx_impulse_len 137
Wenden Sie den Filter auf ein längeres Signal an, mit und ohne das Argument irlen. Der Unterschied zwischen y1 und y2 ist gering. Für lange Signale bietet die Verwendung von irlen eine signifikante Leistungsverbesserung.
>>> x = rng.standard_normal(4000) >>> y1 = signal.filtfilt(b, a, x, method='gust') >>> y2 = signal.filtfilt(b, a, x, method='gust', irlen=approx_impulse_len) >>> print(np.max(np.abs(y1 - y2))) 2.875334415008979e-10