sosfiltfilt#
- scipy.signal.sosfiltfilt(sos, x, axis=-1, padtype='odd', padlen=None)[Quelle]#
Ein vorwärts-rückwärts gerichteter digitaler Filter unter Verwendung von kaskadierten Filtersektionen zweiter Ordnung.
Siehe
filtfiltfür umfassendere Informationen zu dieser Methode.- Parameter:
- sosarray_like
Array von Koeffizienten von Filtersektionen zweiter Ordnung, muss die Form
(n_sections, 6)haben. Jede Zeile entspricht einer Filtersektion zweiter Ordnung, wobei die ersten drei Spalten die Zählerkoeffizienten und die letzten drei die Nennerkoeffizienten liefern.- xarray_like
Das Array der zu filternden Daten.
- axisint, optional
Die Achse von x, auf die der Filter angewendet wird. Standard ist -1.
- padtypestr oder None, optional
Muss ‘odd’, ‘even’, ‘constant’ oder None sein. Dies bestimmt die Art der Erweiterung, die für das aufgefüllte Signal verwendet wird, auf das der Filter angewendet wird. Wenn padtype None ist, wird keine Auffüllung verwendet. Der Standardwert ist ‘odd’.
- padlenint oder None, optional
Die Anzahl der Elemente, um die x an beiden Enden der Achse axis erweitert wird, bevor der Filter angewendet wird. Dieser Wert muss kleiner als
x.shape[axis] - 1sein.padlen=0impliziert keine Auffüllung. Der Standardwert ist3 * (2 * len(sos) + 1 - min((sos[:, 2] == 0).sum(), (sos[:, 5] == 0).sum()))
Die zusätzliche Subtraktion am Ende versucht, Pole und Nullen am Ursprung (z.B. bei Filtern ungerader Ordnung) zu kompensieren, um äquivalente Schätzungen von padlen zu erzielen, wie sie
filtfiltfür Filter zweiter Ordnung bietet, die mit Funktionen vonscipy.signalerstellt wurden.
- Rückgabe:
- yndarray
Die gefilterte Ausgabe mit der gleichen Form wie x.
Siehe auch
Hinweise
Hinzugefügt in Version 0.18.0.
Beispiele
>>> import numpy as np >>> from scipy.signal import sosfiltfilt, butter >>> import matplotlib.pyplot as plt >>> rng = np.random.default_rng()
Erstellen eines interessanten Signals zum Filtern.
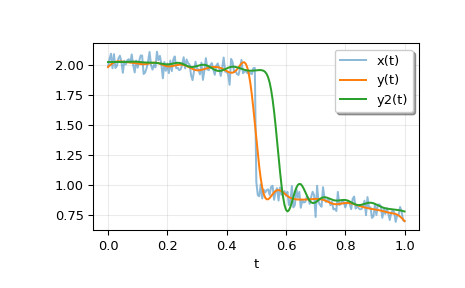
>>> n = 201 >>> t = np.linspace(0, 1, n) >>> x = 1 + (t < 0.5) - 0.25*t**2 + 0.05*rng.standard_normal(n)
Erstellen Sie einen Tiefpass-Butterworth-Filter und verwenden Sie ihn, um x zu filtern.
>>> sos = butter(4, 0.125, output='sos') >>> y = sosfiltfilt(sos, x)
Zum Vergleich wird ein Filter 8. Ordnung mit
sosfiltangewendet. Der Filter wird mit dem Mittelwert der ersten vier Werte von x initialisiert.>>> from scipy.signal import sosfilt, sosfilt_zi >>> sos8 = butter(8, 0.125, output='sos') >>> zi = x[:4].mean() * sosfilt_zi(sos8) >>> y2, zo = sosfilt(sos8, x, zi=zi)
Plotten Sie die Ergebnisse. Beachten Sie, dass die Phase von y mit der Eingabe übereinstimmt, während y2 eine signifikante Phasenverzögerung aufweist.
>>> plt.plot(t, x, alpha=0.5, label='x(t)') >>> plt.plot(t, y, label='y(t)') >>> plt.plot(t, y2, label='y2(t)') >>> plt.legend(framealpha=1, shadow=True) >>> plt.grid(alpha=0.25) >>> plt.xlabel('t') >>> plt.show()