lstsq#
- scipy.linalg.lstsq(a, b, cond=None, overwrite_a=False, overwrite_b=False, check_finite=True, lapack_driver=None)[Quelle]#
Berechnet die Kleinste-Quadrate-Lösung der Gleichung
a @ x = b.Berechnet einen Vektor x, so dass die 2-Norm
|b - A x|minimiert wird.Die Dokumentation wurde unter der Annahme verfasst, dass die Array-Argumente bestimmte „Kern“-Formen haben. Array-Argumente dieser Funktion können jedoch zusätzliche „Batch“-Dimensionen vorangestellt haben. In diesem Fall wird das Array als Stapel von niedrigdimensionalen Schnitten behandelt; siehe Gestapelte lineare Operationen für Details.
- Parameter:
- a(M, N) array_like
Array der linken Seite
- b(M,) oder (M, K) array_like
Array der rechten Seite
- condfloat, optional
Schwellenwert für „kleine“ Singulärwerte; wird zur Bestimmung des effektiven Rangs von a verwendet. Singulärwerte, die kleiner sind als
cond * größter_singulärwert, werden als Null betrachtet.- overwrite_abool, optional
Verwirft Daten in a (kann die Leistung verbessern). Standard ist False.
- overwrite_bbool, optional
Verwirft Daten in b (kann die Leistung verbessern). Standard ist False.
- check_finitebool, optional
Ob überprüft werden soll, ob die Eingabematrizen nur endliche Zahlen enthalten. Das Deaktivieren kann zu einer Leistungssteigerung führen, kann aber zu Problemen (Abstürzen, Nicht-Terminierung) führen, wenn die Eingaben Unendlichkeiten oder NaNs enthalten.
- lapack_driverstr, optional
Welcher LAPACK-Treiber zur Lösung des Kleinste-Quadrate-Problems verwendet wird. Optionen sind
'gelsd','gelsy','gelss'. Die Standardeinstellung ('gelsd') ist eine gute Wahl.'gelsy'kann jedoch bei vielen Problemen etwas schneller sein.'gelss'wurde historisch verwendet. Es ist im Allgemeinen langsam, verbraucht aber weniger Speicher.Hinzugefügt in Version 0.17.0.
- Rückgabe:
- x(N,) oder (N, K) ndarray
Kleinste-Quadrate-Lösung.
- residues(K,) ndarray oder float
Quadrat der 2-Norm für jede Spalte in
b - a x, wennM > Nundrank(A) == n(gibt einen Skalar zurück, wennb1-dimensional ist). Andernfalls wird ein Array der Form (0,) zurückgegeben.- rankint
Effektiver Rang von a.
- s(min(M, N),) ndarray oder None
Singulärwerte von a. Die Konditionszahl von
aists[0] / s[-1].
- Löst aus:
- LinAlgError
Wenn die Berechnung nicht konvergiert.
- ValueError
Wenn Parameter nicht kompatibel sind.
Siehe auch
scipy.optimize.nnlslineare Kleinste-Quadrate-Anpassung mit Nicht-Negativitäts-Beschränkung
Hinweise
Wenn
'gelsy'als Treiber verwendet wird, wird residues auf ein Array der Form (0,) gesetzt und s ist immerNone.Beispiele
>>> import numpy as np >>> from scipy.linalg import lstsq >>> import matplotlib.pyplot as plt
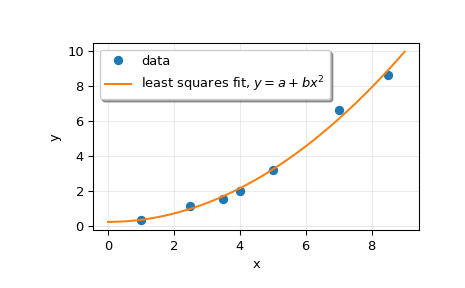
Angenommen, wir haben die folgenden Daten
>>> x = np.array([1, 2.5, 3.5, 4, 5, 7, 8.5]) >>> y = np.array([0.3, 1.1, 1.5, 2.0, 3.2, 6.6, 8.6])
Wir möchten ein quadratisches Polynom der Form
y = a + b*x**2an diese Daten anpassen. Wir bilden zuerst die „Designmatrix“ M, mit einer konstanten Spalte von 1en und einer Spalte, diex**2enthält>>> M = x[:, np.newaxis]**[0, 2] >>> M array([[ 1. , 1. ], [ 1. , 6.25], [ 1. , 12.25], [ 1. , 16. ], [ 1. , 25. ], [ 1. , 49. ], [ 1. , 72.25]])
Wir möchten die Kleinste-Quadrate-Lösung für
M.dot(p) = yfinden, wobeipein Vektor der Länge 2 ist, der die Parameteraundbenthält.>>> p, res, rnk, s = lstsq(M, y) >>> p array([ 0.20925829, 0.12013861])
Zeichnen Sie die Daten und die angepasste Kurve.
>>> plt.plot(x, y, 'o', label='data') >>> xx = np.linspace(0, 9, 101) >>> yy = p[0] + p[1]*xx**2 >>> plt.plot(xx, yy, label='least squares fit, $y = a + bx^2$') >>> plt.xlabel('x') >>> plt.ylabel('y') >>> plt.legend(framealpha=1, shadow=True) >>> plt.grid(alpha=0.25) >>> plt.show()