cont2discrete#
- scipy.signal.cont2discrete(system, dt, method='zoh', alpha=None)[Quellcode]#
Wandelt ein kontinuierliches in ein diskretes Zustandsraum-System um.
- Parameter:
- systemein Tupel, das das System beschreibt, oder eine Instanz von
lti Das Folgende gibt die Anzahl der Elemente im Tupel und die Interpretation an.
1: (Instanz von
lti)2: (Zähler, Nenner)
3: (Nullstellen, Pole, Verstärkung)
4: (A, B, C, D)
- dtfloat
Der Diskretisierungszeitschritt.
- methodstr, optional
Welche Methode verwendet werden soll
gbt: verallgemeinerte bilineare Transformation
bilinear: Tustins Annäherung ("gbt" mit alpha=0.5)
euler: Euler-Verfahren (oder Vorwärtsdifferenzierung) ("gbt" mit alpha=0)
backward_diff: Rückwärtsdifferenzierung ("gbt" mit alpha=1.0)
zoh: Nullstellenhaltefunktion (Standard)
foh: Erstorder-Hold (*versionadded: 1.3.0*)
impulse: äquivalente Impulsantwort (*versionadded: 1.3.0*)
- alphafloat innerhalb von [0, 1], optional
Der Gewichtungsparameter der verallgemeinerten bilinearen Transformation, der nur mit methode="gbt" angegeben werden sollte und ansonsten ignoriert wird.
- systemein Tupel, das das System beschreibt, oder eine Instanz von
- Rückgabe:
- sysdTupel, das das diskrete System enthält
Basierend auf dem Eingabetyp ist die Ausgabe von der Form
(Zähler, Nenner, dt) für Übertragungsfunktions-Eingabe
(Nullstellen, Pole, Verstärkung, dt) für Nullstellen-Pol-Verstärkungs-Eingabe
(A, B, C, D, dt) für Zustandsraum-System-Eingabe
Hinweise
Standardmäßig verwendet die Routine die Zero-Order Hold (zoh)-Methode zur Durchführung der Transformation. Alternativ kann eine verallgemeinerte bilineare Transformation verwendet werden, die die gängige Tustin-Bilinear-Approximation, eine Euler-Methodentechnik oder eine Rückwärtsdifferenzierungstechnik umfasst.
Die Zero-Order Hold (zoh)-Methode basiert auf [1], die verallgemeinerte bilineare Approximation basiert auf [2] und [3], die First-Order Hold (foh)-Methode basiert auf [4].
Referenzen
[3]G. Zhang, X. Chen und T. Chen, Digital redesign via the generalized bilinear transformation, Int. J. Control, vol. 82, no. 4, pp. 741-754, 2009. (https://www.mypolyuweb.hk/~magzhang/Research/ZCC09_IJC.pdf)
[4]G. F. Franklin, J. D. Powell und M. L. Workman, Digital control of dynamic systems, 3. Aufl. Menlo Park, Kalifornien: Addison-Wesley, S. 204-206, 1998.
Beispiele
Wir können ein kontinuierliches Zustandsraum-System in ein diskretes umwandeln
>>> import numpy as np >>> import matplotlib.pyplot as plt >>> from scipy.signal import cont2discrete, lti, dlti, dstep
Definieren Sie ein kontinuierliches Zustandsraum-System.
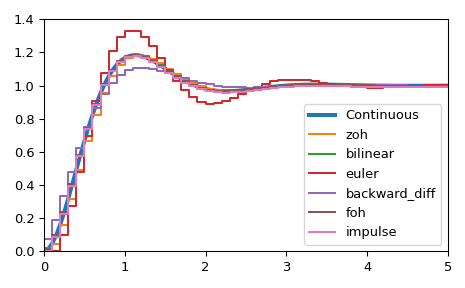
>>> A = np.array([[0, 1],[-10., -3]]) >>> B = np.array([[0],[10.]]) >>> C = np.array([[1., 0]]) >>> D = np.array([[0.]]) >>> l_system = lti(A, B, C, D) >>> t, x = l_system.step(T=np.linspace(0, 5, 100)) >>> fig, ax = plt.subplots() >>> ax.plot(t, x, label='Continuous', linewidth=3)
Wandeln Sie es mit verschiedenen Methoden in ein diskretes Zustandsraum-System um.
>>> dt = 0.1 >>> for method in ['zoh', 'bilinear', 'euler', 'backward_diff', 'foh', 'impulse']: ... d_system = cont2discrete((A, B, C, D), dt, method=method) ... s, x_d = dstep(d_system) ... ax.step(s, np.squeeze(x_d), label=method, where='post') >>> ax.axis([t[0], t[-1], x[0], 1.4]) >>> ax.legend(loc='best') >>> fig.tight_layout() >>> plt.show()