lfilter#
- scipy.signal.lfilter(b, a, x, axis=-1, zi=None)[Quelle]#
Daten entlang einer Dimension mit einem IIR- oder FIR-Filter filtern.
Filtert eine Datensequenz, x, mit einem digitalen Filter. Dies funktioniert für viele grundlegende Datentypen (einschließlich Objekttyp). Der Filter ist eine direkte Implementierung der Transponierten Form II der Standard-Differenzgleichung (siehe Anmerkungen).
Die Funktion
sosfilt(und Filterdesign mitoutput='sos') sollte für die meisten Filteraufgabenlfiltervorgezogen werden, da Zweipunktsektionen weniger numerische Probleme aufweisen.- Parameter:
- barray_like
Der Zählerkoeffizientenvektor in einer 1D-Sequenz.
- aarray_like
Der Nennerkoeffizientenvektor in einer 1D-Sequenz. Wenn
a[0]nicht 1 ist, werden sowohl a als auch b durcha[0]normalisiert.- xarray_like
Ein N-dimensionales Eingabearray.
- axisint, optional
Die Achse des Eingabedatenarrays, entlang der der lineare Filter angewendet werden soll. Der Filter wird auf jeden Unterarray entlang dieser Achse angewendet. Standard ist -1.
- ziarray_like, optional
Anfangsbedingungen für die Filterverzögerungen. Es ist ein Vektor (oder ein Array von Vektoren für eine N-dimensionale Eingabe) der Länge
max(len(a), len(b)) - 1. Wenn zi None ist oder nicht angegeben wird, wird eine anfängliche Ruhe angenommen. Siehelfilticfür weitere Informationen.
- Rückgabe:
- yarray
Die Ausgabe des digitalen Filters.
- zfarray, optional
Wenn zi None ist, wird dies nicht zurückgegeben, andernfalls enthält zf die endgültigen Filterverzögerungswerte.
Siehe auch
lfilticKonstruiert Anfangsbedingungen für
lfilter.lfilter_ziBerechnet den Anfangszustand (stationärer Zustand des Sprungantwort) für
lfilter.filtfiltEin Vorwärts-Rückwärts-Filter, um einen Filter mit Nullphasen zu erhalten.
savgol_filterEin Savitzky-Golay-Filter.
sosfiltFiltert Daten unter Verwendung kaskadierter Zweipunktsektionen.
sosfiltfiltEin Vorwärts-Rückwärts-Filter, der Zweipunktsektionen verwendet.
Hinweise
Die Filterfunktion wird als direkte II-transponierte Struktur implementiert. Das bedeutet, dass der Filter Folgendes implementiert:
a[0]*y[n] = b[0]*x[n] + b[1]*x[n-1] + ... + b[M]*x[n-M] - a[1]*y[n-1] - ... - a[N]*y[n-N]
wobei M der Grad des Zählers ist, N der Grad des Nenners ist und n die Stichprobennummer ist. Es wird mit den folgenden Differenzgleichungen implementiert (unter der Annahme M = N):
a[0]*y[n] = b[0] * x[n] + d[0][n-1] d[0][n] = b[1] * x[n] - a[1] * y[n] + d[1][n-1] d[1][n] = b[2] * x[n] - a[2] * y[n] + d[2][n-1] ... d[N-2][n] = b[N-1]*x[n] - a[N-1]*y[n] + d[N-1][n-1] d[N-1][n] = b[N] * x[n] - a[N] * y[n]
wobei d die Zustandsvariablen sind.
Die rationale Übertragungsfunktion, die diesen Filter im z-Transformationsbereich beschreibt, lautet:
-1 -M b[0] + b[1]z + ... + b[M] z Y(z) = -------------------------------- X(z) -1 -N a[0] + a[1]z + ... + a[N] z
Beispiele
Generieren eines verrauschten Signals zum Filtern
>>> import numpy as np >>> from scipy import signal >>> import matplotlib.pyplot as plt >>> rng = np.random.default_rng() >>> t = np.linspace(-1, 1, 201) >>> x = (np.sin(2*np.pi*0.75*t*(1-t) + 2.1) + ... 0.1*np.sin(2*np.pi*1.25*t + 1) + ... 0.18*np.cos(2*np.pi*3.85*t)) >>> xn = x + rng.standard_normal(len(t)) * 0.08
Erstellen eines Tiefpass-Butterworth-Filters 3. Ordnung
>>> b, a = signal.butter(3, 0.05)
Anwenden des Filters auf xn. Verwenden Sie lfilter_zi, um die Anfangsbedingung des Filters zu wählen
>>> zi = signal.lfilter_zi(b, a) >>> z, _ = signal.lfilter(b, a, xn, zi=zi*xn[0])
Anwenden des Filters erneut, um ein Ergebnis zu erhalten, das mit einer Ordnung gefiltert wurde, die mit filtfilt übereinstimmt
>>> z2, _ = signal.lfilter(b, a, z, zi=zi*z[0])
Verwenden Sie filtfilt, um den Filter anzuwenden
>>> y = signal.filtfilt(b, a, xn)
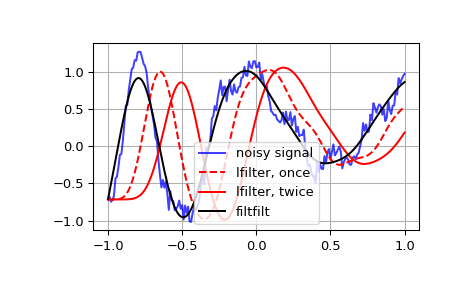
Plotten Sie das ursprüngliche Signal und die verschiedenen gefilterten Versionen
>>> plt.figure >>> plt.plot(t, xn, 'b', alpha=0.75) >>> plt.plot(t, z, 'r--', t, z2, 'r', t, y, 'k') >>> plt.legend(('noisy signal', 'lfilter, once', 'lfilter, twice', ... 'filtfilt'), loc='best') >>> plt.grid(True) >>> plt.show()