ConvexHull#
- class scipy.spatial.ConvexHull(points, incremental=False, qhull_options=None)#
Konvexe Hüllen in N Dimensionen.
Hinzugefügt in Version 0.12.0.
- Parameter:
- pointsndarray von floats, Form (npoints, ndim)
Koordinaten der Punkte, aus denen eine konvexe Hülle konstruiert werden soll
- incrementalbool, optional
Ermöglicht das schrittweise Hinzufügen neuer Punkte. Dies beansprucht zusätzliche Ressourcen.
- qhull_optionsstr, optional
Zusätzliche Optionen, die an Qhull übergeben werden. Siehe Qhull-Handbuch für Details. (Standard: „Qx“ für ndim > 4 und „“ ansonsten) Option „Qt“ ist immer aktiviert.
- Attribute:
- pointsndarray von double, Form (npoints, ndim)
Koordinaten der Eingabepunkte.
- verticesndarray von ints, Form (nvertices,)
Indizes der Punkte, die die Eckpunkte der konvexen Hülle bilden. Bei 2-D-konvexen Hüllen sind die Eckpunkte gegen den Uhrzeigersinn geordnet. In anderen Dimensionen sind sie in der Eingabereihenfolge.
- simplicesndarray von ints, Form (nfacet, ndim)
Indizes der Punkte, die die simplizialen Facetten der konvexen Hülle bilden.
- neighborsndarray von ints, Form (nfacet, ndim)
Indizes der Nachbarfacetten für jede Facette. Der k-te Nachbar liegt gegenüber dem k-ten Eckpunkt. -1 bedeutet kein Nachbar.
- equationsndarray von double, Form (nfacet, ndim+1)
[Normalenvektor, Abstand] der Ebenengleichung der Facette (siehe Qhull-Dokumentation für weitere Informationen).
- coplanarndarray von int, Form (ncoplanar, 3)
Indizes von koplanaren Punkten und die entsprechenden Indizes der nächsten Facetten und nächsten Eckpunktindizes. Koplanare Punkte sind Eingabepunkte, die aufgrund von numerischen Präzisionsproblemen *nicht* in die Triangulierung aufgenommen wurden.
Wenn die Option „Qc“ nicht angegeben ist, wird diese Liste nicht berechnet.
- goodndarray von bool oder None
Ein eindimensionales boolesches Array, das angibt, welche Facetten „gut“ sind. Wird mit Optionen verwendet, die gute Facetten berechnen, z. B. QGn und QG-n. Gute Facetten sind definiert als diejenigen, die von Punkt n aus sichtbar (n) oder unsichtbar (-n) sind, wobei n der n-te Punkt in ‚points‘ ist. Das Attribut ‚good‘ kann als Index in ‚simplices‘ verwendet werden, um die guten (sichtbaren) Facetten zurückzugeben: simplices[good]. Eine Facette ist nur von außerhalb der Hülle sichtbar, und weder Koplanarität noch Degeneration zählen als Sichtbarkeitsfälle.
Wenn eine „QGn“- oder „QG-n“-Option nicht angegeben ist, wird None zurückgegeben.
Hinzugefügt in Version 1.3.0.
- areafloat
Oberflächeninhalt der konvexen Hülle, wenn die Eingabedimension > 2 ist. Wenn die Eingabe
points2-dimensional ist, ist dies der Umfang der konvexen Hülle.Hinzugefügt in Version 0.17.0.
- volumefloat
Volumen der konvexen Hülle, wenn die Eingabedimension > 2 ist. Wenn die Eingabe
points2-dimensional ist, ist dies die Fläche der konvexen Hülle.Hinzugefügt in Version 0.17.0.
Methoden
add_points(points[, restart])Verarbeitet eine Menge zusätzlicher neuer Punkte.
close()Beendet die schrittweise Verarbeitung.
- Löst aus:
- QhullError
Wird ausgelöst, wenn Qhull auf eine Fehlerbedingung stößt, z. B. eine geometrische Degeneration, wenn keine Optionen zur Behebung aktiviert sind.
- ValueError
Wird ausgelöst, wenn ein inkompatibles Array als Eingabe gegeben wird.
Hinweise
Die konvexe Hülle wird mit der Qhull-Bibliothek berechnet.
Referenzen
[Qhull]Beispiele
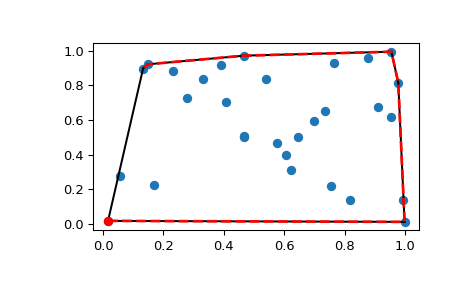
Konvexe Hülle einer zufälligen Punktmenge
>>> from scipy.spatial import ConvexHull, convex_hull_plot_2d >>> import numpy as np >>> rng = np.random.default_rng() >>> points = rng.random((30, 2)) # 30 random points in 2-D >>> hull = ConvexHull(points)
Zeichne sie
>>> import matplotlib.pyplot as plt >>> plt.plot(points[:,0], points[:,1], 'o') >>> for simplex in hull.simplices: ... plt.plot(points[simplex, 0], points[simplex, 1], 'k-')
Wir hätten auch direkt die Eckpunkte der Hülle verwenden können, die bei 2-D garantiert gegen den Uhrzeigersinn geordnet sind
>>> plt.plot(points[hull.vertices,0], points[hull.vertices,1], 'r--', lw=2) >>> plt.plot(points[hull.vertices[0],0], points[hull.vertices[0],1], 'ro') >>> plt.show()
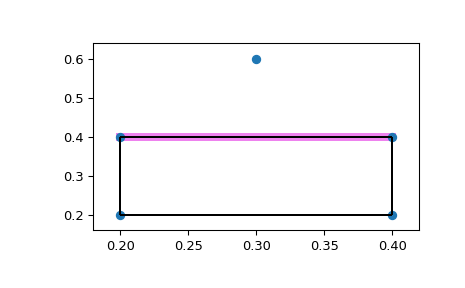
Von einem Punkt aus sichtbare Facetten
Erstellen Sie ein Quadrat und fügen Sie einen Punkt oberhalb des Quadrats hinzu.
>>> generators = np.array([[0.2, 0.2], ... [0.2, 0.4], ... [0.4, 0.4], ... [0.4, 0.2], ... [0.3, 0.6]])
Rufen Sie ConvexHull mit der Option QG auf. QG4 bedeutet, die Teile der Hülle zu berechnen, die Punkt 4 nicht einschließen, und gibt die Facetten an, die von Punkt 4 aus sichtbar sind.
>>> hull = ConvexHull(points=generators, ... qhull_options='QG4')
Das Array „good“ gibt an, welche Facetten von Punkt 4 aus sichtbar sind.
>>> print(hull.simplices) [[1 0] [1 2] [3 0] [3 2]] >>> print(hull.good) [False True False False]
Nun plotten wir es und heben die sichtbaren Facetten hervor.
>>> fig = plt.figure() >>> ax = fig.add_subplot(1,1,1) >>> for visible_facet in hull.simplices[hull.good]: ... ax.plot(hull.points[visible_facet, 0], ... hull.points[visible_facet, 1], ... color='violet', ... lw=6) >>> convex_hull_plot_2d(hull, ax=ax) <Figure size 640x480 with 1 Axes> # may vary >>> plt.show()