splprep#
- scipy.interpolate.splprep(x, w=None, u=None, ub=None, ue=None, k=3, task=0, s=None, t=None, full_output=0, nest=None, per=0, quiet=1)[Quelle]#
Finden Sie die B-Spline-Darstellung einer N-dimensionalen Kurve.
Veraltet
Diese Funktion gilt als veraltet und wird keine Updates mehr erhalten. Obwohl wir derzeit keine Pläne haben, sie zu entfernen, empfehlen wir, dass neuer Code stattdessen modernere Alternativen verwendet. Insbesondere empfehlen wir, in neuem Code
make_splprepzu verwenden.Finden Sie eine glatte, approximierende Spline-Kurve g(u), gegeben eine Liste von N Rang-1-Arrays, x, die eine parametrisierte Kurve im N-dimensionalen Raum u darstellen. Verwendet die FORTRAN-Routine parcur aus FITPACK.
- Parameter:
- xarray_like
Eine Liste von Vektor-Arrays, die die Kurve repräsentieren.
- warray_like, optional
Streng positive Rang-1-Arrays von Gewichten gleicher Länge wie x[0]. Die Gewichte werden bei der Berechnung der gewichteten Spline-Anpassung nach kleinsten Quadraten verwendet. Wenn die Fehler in den x-Werten die Standardabweichung d haben, dann sollte w gleich 1/d sein. Standardmäßig
ones(len(x[0])).- uarray_like, optional
Ein Array von Parameterwerten. Wenn nicht angegeben, werden diese Werte automatisch berechnet als
M = len(x[0]), wobeiv[0] = 0
v[i] = v[i-1] + distance(x[i], x[i-1])
u[i] = v[i] / v[M-1]
- ub, ueint, optional
Die Endpunkte des Parameterintervalls. Standardmäßig u[0] und u[-1].
- kint, optional
Grad des Splines. Kubische Splines werden empfohlen. Gerade Werte von k sollten besonders bei kleinem s-Wert vermieden werden.
1 <= k <= 5, Standard ist 3.- taskint, optional
Wenn task==0 (Standard), finden Sie t und c für einen gegebenen Glättungsfaktor s. Wenn task==1, finden Sie t und c für einen anderen Wert des Glättungsfaktors s. Es muss ein vorheriger Aufruf mit task=0 oder task=1 für denselben Datensatz erfolgt sein. Wenn task=-1, finden Sie die gewichtete Spline-Anpassung nach kleinsten Quadraten für einen gegebenen Satz von Knoten, t.
- sfloat, optional
Eine Glättungsbedingung. Das Ausmaß der Glättung wird durch die Erfüllung der folgenden Bedingungen bestimmt:
sum((w * (y - g))**2,axis=0) <= s, wobei g(x) die geglättete Interpolation von (x,y) ist. Der Benutzer kann s verwenden, um den Kompromiss zwischen Nähe und Glattheit der Anpassung zu steuern. Größeres s bedeutet mehr Glättung, während kleinere Werte von s weniger Glättung anzeigen. Empfohlene Werte für s hängen von den Gewichten w ab. Wenn die Gewichte die Umkehrung der Standardabweichung von y darstellen, dann sollte ein guter s-Wert im Bereich(m-sqrt(2*m),m+sqrt(2*m))liegen, wobei m die Anzahl der Datenpunkte in x, y und w ist.- tarray, optional
Die Knoten, die für
task=-1benötigt werden. Es müssen mindestens2*k+2Knoten vorhanden sein.- full_outputint, optional
Wenn ungleich Null, werden optionale Ausgaben zurückgegeben.
- nestint, optional
Eine Überschätzung der Gesamtzahl der Knoten des Splines, um bei der Bestimmung des Speicherplatzes zu helfen. Standardmäßig nest=m/2. Immer ausreichend groß ist nest=m+k+1.
- perint, optional
Wenn ungleich Null, werden die Datenpunkte als periodisch mit der Periode
x[m-1] - x[0]betrachtet und eine glatte, periodische Spline-Approximation wird zurückgegeben. Die Werte vony[m-1]undw[m-1]werden nicht verwendet.- quietint, optional
Ungleich Null, um Meldungen zu unterdrücken.
- Rückgabe:
- tcktuple
Ein Tupel,
(t,c,k), das den Vektor der Knoten, die B-Spline-Koeffizienten und den Grad des Splines enthält.- uarray
Ein Array der Werte des Parameters.
- fpfloat
Die gewichtete Summe der quadrierten Residuen der Spline-Approximation.
- ierint
Ein Integer-Flag für den Erfolg von splrep. Erfolg wird angezeigt, wenn ier<=0. Wenn ier in [1,2,3] ein Fehler aufgetreten ist, aber nicht gemeldet wurde. Andernfalls wird ein Fehler gemeldet.
- msgstr
Eine Nachricht, die dem Integer-Flag ier entspricht.
Siehe auch
Hinweise
Siehe
splevzur Auswertung des Splines und seiner Ableitungen. Die Anzahl der Dimensionen N muss kleiner als 11 sein.Die Anzahl der Koeffizienten im Array c ist
k+1weniger als die Anzahl der Knotenlen(t). Dies steht im Gegensatz zusplrep, welches das Array der Koeffizienten mit Nullen auffüllt, um die gleiche Länge wie das Array der Knoten zu haben. Diese zusätzlichen Koeffizienten werden von den AuswertungsroutinensplevundBSplineignoriert.Referenzen
[1]P. Dierckx, “Algorithms for smoothing data with periodic and parametric splines, Computer Graphics and Image Processing”, 20 (1982) 171-184.
[2]P. Dierckx, „Algorithms for smoothing data with periodic and parametric splines“, report tw55, Dept. Computer Science, K.U.Leuven, 1981.
[3]P. Dierckx, “Curve and surface fitting with splines”, Monographs on Numerical Analysis, Oxford University Press, 1993.
Beispiele
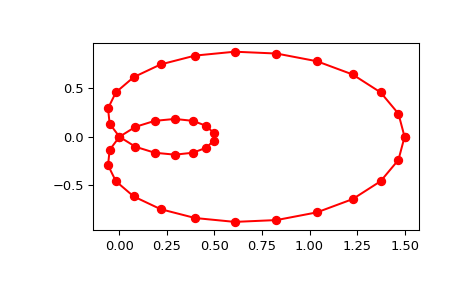
Generieren Sie eine Diskretisierung einer Limacon-Kurve in Polarkoordinaten
>>> import numpy as np >>> phi = np.linspace(0, 2.*np.pi, 40) >>> r = 0.5 + np.cos(phi) # polar coords >>> x, y = r * np.cos(phi), r * np.sin(phi) # convert to cartesian
Und interpolieren
>>> from scipy.interpolate import splprep, splev >>> tck, u = splprep([x, y], s=0) >>> new_points = splev(u, tck)
Beachten Sie, dass (i) wir die Interpolation erzwingen, indem wir
s=0verwenden, (ii) die Parametrisierunguautomatisch generiert wird. Plotten Sie nun das Ergebnis>>> import matplotlib.pyplot as plt >>> fig, ax = plt.subplots() >>> ax.plot(x, y, 'ro') >>> ax.plot(new_points[0], new_points[1], 'r-') >>> plt.show()